





What Is an IP Mesh Radio and How Does It Work?
2025-10-24

Introduction
In movies, we often see swarms of drones flying over like a swarm of locusts. But in reality, they are even more terrifying - because even if you disturb half of them, the rest can still cooperate seamlessly, like a group of unkillable electronic wolves.

▲Figure 1: Schematic Diagram of Unmanned Aerial Vehicle Swarm Combat System (Source: China Military Museum)
I. The Concept of Drone Swarms
The "swarm" of unmanned aircraft refers to a group of low-cost small unmanned aircraft equipped with various mission payloads. They are integrated based on an open architecture, centered around communication network information, with the system's collective intelligence emergence capability as the core, the collaborative interaction ability between platforms as the foundation, and the node combat capability of a single platform as the support. This is used to construct a combat network system with advantages such as anti-destruction capability, low cost, and decentralization, as well as intelligent attack characteristics.

▲Figure 2: US military tests "drone swarm tactics"
II. Current Development Status of Drone Swarms
To accelerate the rapid practical application of unmanned swarms, major military powers around the world attach great importance to this and increase their research and innovation efforts. They have also conducted numerous experiments on unmanned swarms to prepare for future intelligent and unmanned warfare.
1. The current situation of unmanned bee colonies abroad
Since the 1990s, the United States has proposed the concept of unmanned swarm warfare. In the "Small Unmanned Aircraft System Flight Planning 2016-2036" released in 2016, new combat concepts such as "swarm" and "formation" were proposed at the strategic level. In recent years, the US military has carried out a series of research, experiments and demonstration verification projects on unmanned "swarm" through projects, plans and combat concepts. Relevant projects such as "Close Combat Concealed Autonomous Unmanned One-time Aircraft" (CICADA), "Quail" (Perdix) micro unmanned aircraft, "Cooperative Combat in Denied Environments" (CODE), "Low-Cost Unmanned Swarm Technology" (LOCUST), "Gremlins" and "Offensive Swarm Enabled Tactics" (OFFSET) have been carried out successively.
The US military has a wide variety of small unmanned aircraft suitable for cluster operations. They can be classified into different size categories such as the ten-gram class ("Cicada"), the hundred-gram class ("Gray Quail"), the kilogram class ("Coon"), and the hundred-kilogram class ("Little Elf"). According to their functions, they can be further divided into decoy type, reconnaissance type, interference type, and all-kill type. The decoy type is used to lure the opponent's radar and other reconnaissance equipment to turn on or to lure the opponent into launching a firepower strike, thereby exposing the positions of reconnaissance and firepower strike forces. The reconnaissance type is used for close-range reconnaissance, targeting, and conducting combat damage assessment. The interference type carries various electronic warfare equipment to conduct close-range interference. The all-kill type mainly conducts disabling strikes on the opponent's radar, communication, and command and control system nodes, achieving a small-scale victory to defeat the entire combat system of the opponent.

▲Figure 3: On April 18, 2018, Dynetics Company released an imagined image of the C-130 recovering the "Little Sprite" unmanned aircraft.
(2)The current situation of unmanned swarms in Russia
The Russian "Lightning" and S-70 "Hunter" dual-capable escort aircraft can both be used in a "swarm" formation with manned aircraft. In 2019, Russia proposed a swarm warfare concept using Flock-93 drones as combat units, planning to form an unmanned swarm formation with 100 Flock-93 drones to conduct "surgical" strikes against terrorists and high-tech adversaries using small-dose warheads. It is reported that in the six-generation fighter aircraft project, Russia also clearly stated that the pilot is expected to be able to command and control up to 5 to 10 unmanned swarms around them. These unmanned swarms are equipped with high-energy electromagnetic cannons, which can paralyze enemy electronic systems several kilometers away.

▲Figure 4: Russian S-70 "Hunter"
(3)The current situation of unmanned bee colonies in other countries
In recent years, some countries in Europe and the Middle East have carried out unmanned bee colony technology verification through experiments and competitions. The European Defense Agency's "European Swarm" project focuses on the verification of key technologies such as autonomous decision-making and collaborative flight of unmanned swarms. Türkiye claims to use 500 suicide UAVs to form a hive combat formation, and regards it as the decisive force to change the rules of the battlefield. The South Korean military is also vigorously developing unmanned swarms for reconnaissance and strike in response to North Korea's ballistic missile and nuclear testing equipment. In 2021, India showcased its offensive unmanned swarm technology for the first time, which can intelligently recognize targets up to 50km away and carry out suicide attacks. In 2021, Paramount Advanced Technologies (PAT) in South Africa launched the first long-range precision strike drone system, the N-Raven. The drone weighs about 40kg, has a cruising speed of about 80km/h, and a range of about 2 hours. It uses next-generation swarm technology to fly in a covert and low signal manner in the complex and ever-changing battlefield environment. At the same time, the N-Raven swarm carries multiple sensors, each of which can carry a payload of 10-15kg, with a maximum attack radius of about 250km. The drone uses sensors such as EO/IR (electro-optical/infrared) and semi-active laser for target recognition and tracking, avoiding hitting the same target in complex and changing battlefields, thereby reducing combat efficiency and affecting combat effectiveness.
2. The current situation of unmanned bee colonies in China
Although domestic research work started relatively late, it has still achieved certain research results. In recent years, the continuous experimental research on land and air fixed-wing unmanned swarms carried out by China Electronics Technology Group Corporation has marked that our country's unmanned swarms are gradually moving towards practical application. In 2016, at the Zhuhai Airshow, 67 unmanned aircraft were successfully launched at one time, breaking the record of 50 unmanned aircraft launched simultaneously set by the United States; the following year, a successful fixed-wing unmanned swarm flight test of 119 aircraft was conducted, and up to now, it is possible to achieve a combination of multiple launch vehicles to simultaneously launch 200 unmanned aircraft to form a swarm formation, which will greatly promote the rapid formation of our country's unmanned swarm cooperative networking, precise formation, formation transformation, and precise strike combat capabilities.
In May 2022, the research team from Zhejiang University in China developed a micro intelligent drone swarm technology. This technology enables the drone swarm to freely move through bamboo forests that are overgrown with weeds and thick with foliage. At the same time, the drone swarm can continuously observe and explore the environment, autonomously control the formation, thereby avoiding obstacles and avoiding unnecessary damage. This technology successfully solved a series of problems such as autonomous navigation, trajectory planning, and intelligent obstacle avoidance of the drone swarm in complex and unpredictable environments. It can be used in disaster relief situations where rescue personnel cannot reach, such as in fires, deserts, and cliffs, to better complete tasks like searching and rescuing targets, reducing the risks for rescue personnel, as shown in the illustration:
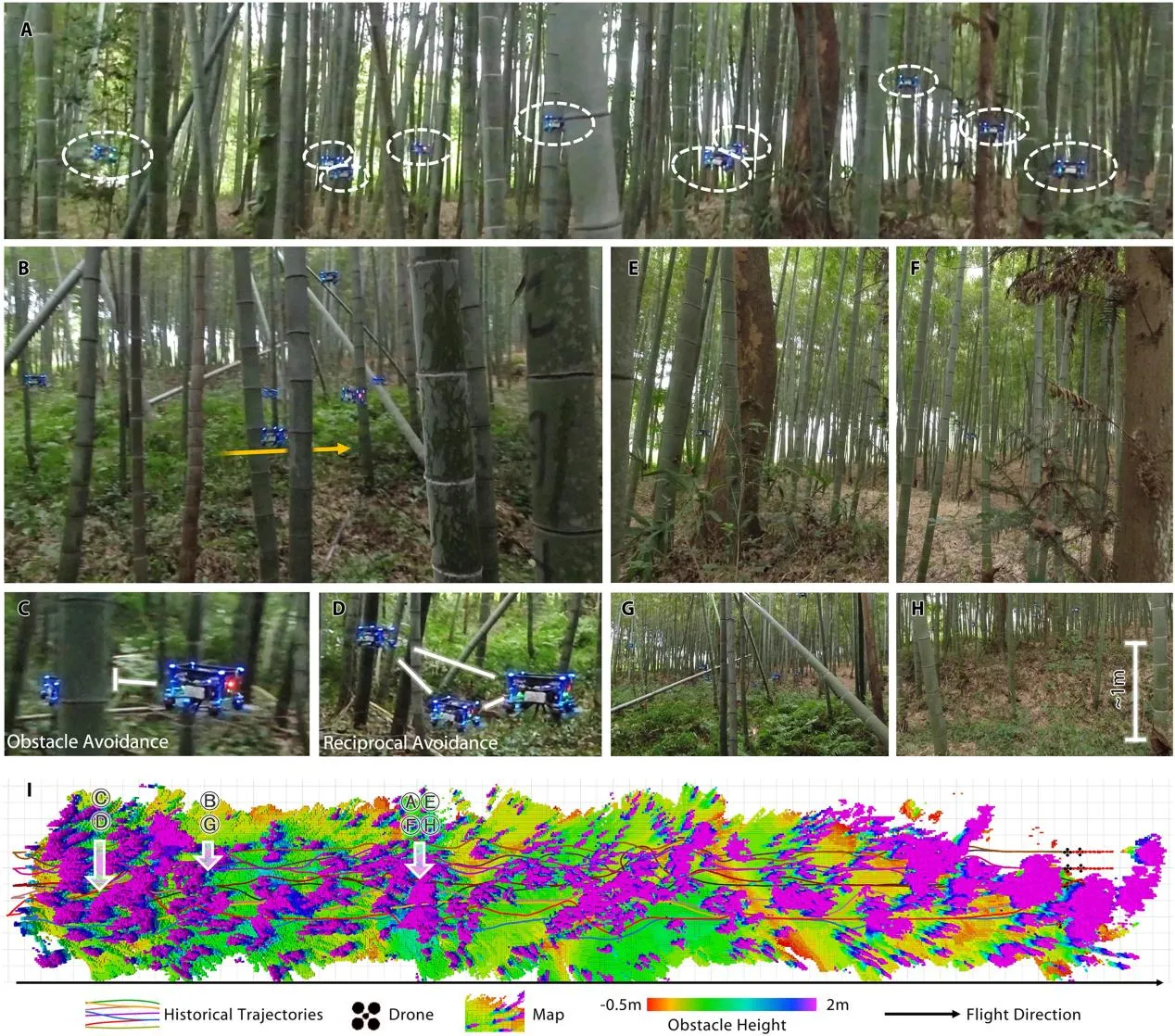
▲Figure 5: A swarm of micro drones passing through the bamboo forest (quoted from the article "Swarm of micro flying robots in the wild")
III. Wireless Ad Hoc Network
What makes swarm technology so challenging? A real swarm consists of a large number of bees and is quite dense. However, the entire flying team does not collide with each other, and can split into several parts or form larger teams at any time according to different mission requirements. This flying mode brings extremely high flexibility to combat operations, but it is not easy to achieve. Whether it is a quadcopter drone or a fixed-wing drone, there are very high requirements for the autonomous networking, flight formation control, intelligence level of the drones, and communication control links. Next, we will introduce the self-networking communication technology of drone swarms.
▲Figure 6: Unmanned Aerial Vehicle Self-Organized Network
1. Basic Concepts
Unmanned aerial vehicle ad hoc network, also known as UAV network or unmanned aerial Ad Hoc network (UAANET), the basic idea is as follows: The communication among multiple unmanned aircraft does not entirely rely on ground control stations or satellite-based communication facilities. Instead, the unmanned aircraft are regarded as network nodes, and each node can forward control instructions to each other, exchange data such as sensing situations, health conditions, and intelligence collection, and automatically connect to establish a wireless mobile network.
In the "Unmanned Aircraft Roadmap" and "Unmanned System Integration Roadmap" released by the US military, unmanned aircraft are clearly designated as important nodes in the future global information grid (GIG), and it is pointed out that ad hoc networking will be the development direction of future unmanned aircraft tactical interconnection networks. The concept of unmanned aircraft ad hoc network (UAV Ad Hoc Network, UANET) emerged under this background. It expands the concepts of mobile ad hoc network (MANET) and vehicle ad hoc network (VANET) to the network communication of unmanned aircraft, enabling each unmanned aircraft in the network to distribute and transmit command instructions, sense situations and collect data, etc., and possessing the advantages of effectively expanding the scale of the network system, providing secure, reliable and highly resilient network communication, supporting multi-unmanned aircraft tactical coordination, effectively reducing the payload and expenses of unmanned aircraft, being able to assist other communication methods, and significantly improving the tactical effectiveness of unmanned aircraft combat platforms.
Each node in this network has the functions of both a transmitter/receiver and a router. It forwards data to distant nodes in a multi-hop manner. The unmanned aerial vehicle (UAV) ad hoc network adopts technologies such as dynamic networking and wireless relaying to achieve interconnection among UAVs. It possesses the capabilities of self-organization and self-repair, as well as the advantages of efficient and rapid networking. It can meet the application requirements of UAVs under specific conditions, complementing and improving the existing UAV communication system. It has significant theoretical research and practical application value.
2. Main feature
Unmanned aerial vehicle (UAV) ad hoc networks are a special form of wireless ad hoc networks. They not only possess inherent features such as multi-hop, self-organization, and no central authority, but also have their own particularities. The main characteristics are as follows.
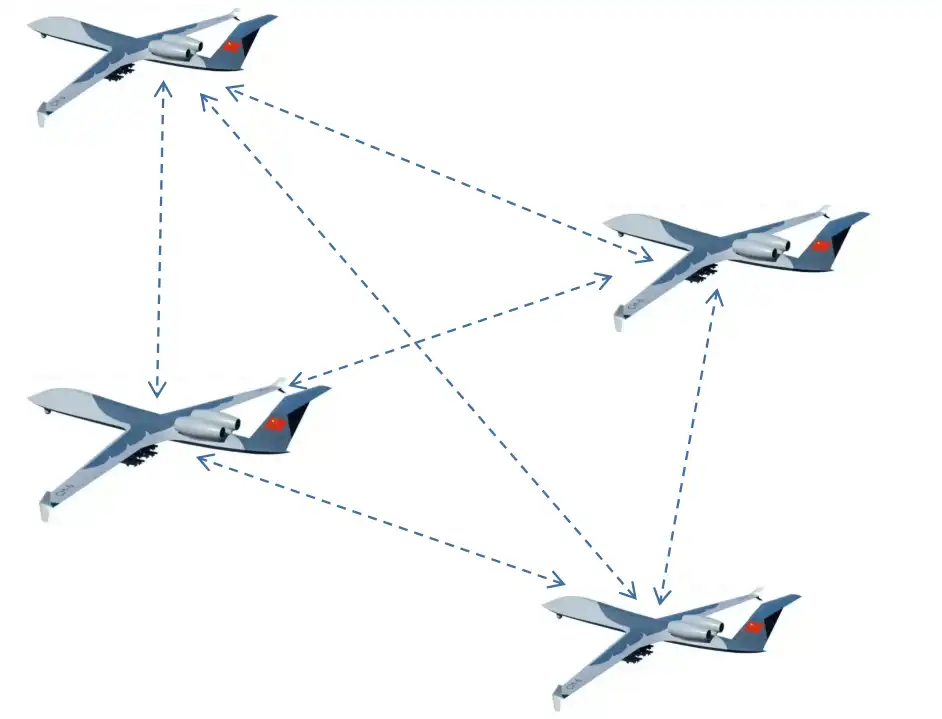
▲Figure 7: Topology Diagram of Unmanned Aerial Vehicle Formation Self-Organized Network
(1)The high-speed movement of nodes and the high-dynamic changes in network topology
This is the most significant difference between unmanned aerial vehicle (UAV) self-organizing networks and traditional self-organizing networks. Reference 1 indicates that the speed of UAVs ranges from 30 to 460 km/h. Such high-speed movement will cause rapid changes in topology, which will have a significant impact on network connectivity and protocol performance; at the same time, communication failures of the UAV platform and instability of line-of-sight communication links will also cause link interruptions and topology updates.
(2)The sparsity of nodes and the heterogeneity of the network
The unmanned aerial vehicle nodes are scattered and distributed in the air. The distances between the nodes are mostly several kilometers. In a certain airspace, the node density is relatively low. Therefore, network connectivity is a problem that deserves attention.
In the actual application of unmanned aircraft, they need to establish communication connections with various platforms such as ground stations, satellites, manned aircraft, and near-space platforms; the ad-hoc network structure may include different types of unmanned aircraft or adopt a hierarchical and distributed structure. Under these circumstances, the nodes are different, and the entire network may be heterogeneously interconnected.
(3)The node capabilities are strong and the network temporariness is obvious.
The communication and computing equipment of the nodes are provided with space and energy by the unmanned aircraft. Except for the mini type, they can generally meet the requirements. Compared with the traditional MANET, the unmanned aircraft ad hoc network generally does not need to consider the energy consumption and computing capacity of the nodes separately; the application of GPS can provide precise positioning and timing information for the nodes, facilitating the nodes to obtain their own position information and perform clock synchronization; the path planning function of the onboard computer can effectively assist in routing decisions. The application of unmanned aircraft is mostly carried out for specific tasks, and the operation is not very regular. Within a certain airspace, there are situations with lower node density and greater flight uncertainty, so the network has stronger temporality.
(4)The uniqueness of network targets
The goal of traditional Ad Hoc networks is to establish peer-to-peer connections. Similarly, unmanned aerial vehicle (UAV) ad hoc networks also need to establish peer-to-peer connections for the coordination and collaboration functions of the UAVs. Secondly, some nodes in the network need to act as the central node for data collection, similar to the functions of wireless sensor networks, and thus need to support traffic aggregation. Thirdly, the network may include various types of sensors, and different data delivery strategies of different sensors need to be effectively guaranteed. Finally, the business data, including images, audio, and videos, has characteristics such as large transmission data volume, diversified data structure, and sensitivity to delay, and corresponding QoS needs to be ensured.
(5)The uniqueness of the mobile model
The mobile model has significant impacts on the routing protocols and mobility management of Ad Hoc networks. Unlike the random movement of MANET and the restricted movement of VANET, the movement patterns of unmanned aerial vehicle (UAV) nodes are unique. In some multi-UAV applications, a global path planning approach is preferred, and in such cases, the movement of the UAVs follows a regular pattern. However, the flight path of automated UAVs is not predetermined, and the flight plan may also change during operation. Reference 2 proposed two mobile models for UAVs performing reconnaissance tasks: the first is an entity random movement model, which conducts independent random movements in left, right, and straight directions based on a predetermined Markov process; the second is a distributed pheromone repel mobility model (DPR), which guides the movement of UAVs based on the amount of pheromone generated during the UAV reconnaissance process, featuring reliable search characteristics. Reference 3 proposed a semi-random circular movement (SRCM) model for UAVs performing circular movements within a certain area, deriving the approximate distribution function of node movement probabilities using a two-dimensional circular region. Reference 4 proposed an enhanced Gaussian Markov mobility model (EGM) for UAVs that need to overcome sudden stops and turns and maintain smooth flight paths during operation. By correcting the direction deviation of the GM model (Gaussian Markov model), this model can effectively implement the boundary avoidance mechanism and obtain more realistic UAV movement trajectories.
3. The network structure of unmanned aerial vehicle (UAV) ad hoc networks
Unmanned aerial vehicle (UAV) ad hoc networks are the further application of mobile ad hoc networks in the field of UAVs. It differs from ordinary mobile ad hoc networks in that the network nodes in UAV ad hoc networks are not affected by terrain during their movement, and their speed is generally much faster than that of traditional mobile ad hoc network nodes. Its network structure mostly adopts distributed control, and its advantage lies in that the routing selection is completed by a small number of nodes in the network, which not only reduces the network information exchange between nodes but also overcomes the disadvantage of overly centralized routing control. The network structure of UAV ad hoc networks can be classified into planar structure and clustering structure according to the topology and characteristics of the network nodes. In the planar structure, the network robustness and security are relatively high, but the scalability is relatively weak, and it is suitable for small-scale ad hoc networks; in the clustering structure, the network scalability is stronger, and it is more suitable for large-scale UAV ad hoc networks.
(1)Planar construction
The planar structure is also known as the equivalent structure. In this structure, all nodes are identical, and they have the same energy distribution, network structure and routing selection. The network structure is shown in Figure 8. Due to the limited number of drone nodes and simple distribution, this network has strong robustness and high security, with little interference between channels. However, as the number of nodes increases, the routing tables and task information stored by each node also increase, the network load increases, and the system control overhead suddenly rises, making the system difficult to control and prone to collapse.
Therefore, this planar structure cannot accommodate a large number of nodes, resulting in poor scalability and being only suitable for small-scale ad hoc networks.
▲Figure 8: Planar Structure
(2)Cluster structure
Several different sub-network clustering structures are formed based on the different functions of the unmanned aerial vehicle nodes. In each sub-network, a key node is selected, whose function is to serve as the command control center of the sub-network and to connect other nodes within the network. The key nodes in each sub-network within the clustering structure are interconnected and can communicate with each other. The information exchange between non-key nodes can be carried out either through the key nodes or directly.
The key nodes and non-key nodes of the entire sub-network together form the clustered network. Depending on the different node configurations, it can be further divided into single-frequency clustering and multi-frequency clustering.
① Single-frequency clustering
As shown in Figure 9, in the single-frequency clustering structure, there are four types of nodes in the network: cluster head/non-cluster head nodes, gateway/distributed gateway nodes. The backbone link routes the cluster head and gateway nodes. All nodes communicate using the same frequency. The networking form is simple and rapid, and the frequency band utilization is also higher. However, this type of network is prone to resource-constrained situations, such as when the number of nodes in the network increases, interference between channels may occur.
To prevent the failure of task execution due to co-frequency interference, in large-scale unmanned aerial vehicle ad hoc networks, this structure should be avoided when the radius of each cluster is approximately the same.

▲Figure 9: Single-frequency clustering structure
② Multi-frequency clustering
Unlike single-frequency clustering where each layer has only one cluster, multi-frequency clustering involves several layers, and each layer contains several clusters. In a clustered network, network nodes can be divided into multiple different clusters. Within each cluster, different nodes are classified as cluster head nodes and member nodes based on their level, and are assigned different communication frequencies. Within the cluster, member nodes have simple tasks and do not significantly increase the network routing overhead, but cluster head nodes need to manage the cluster internally and have more complex routing information to maintain, consuming a large amount of energy.
Similarly, the communication coverage capability also varies depending on the node level. The higher the level, the greater the coverage capability. On the other hand, when a node belongs to two different levels simultaneously, it indicates that the node needs to use different frequencies to perform multiple tasks, so the number of frequencies is the same as the number of tasks.
The specific multi-frequency clustering structure is shown in Figure 10. In this structure, the cluster head communicates with other members within the cluster and with nodes within other layers. The communication among different layers does not interfere with each other. This structure is suitable for ad hoc networks among large-scale unmanned aerial vehicles. Compared with the single-cluster structure, it has better scalability, higher load capacity, and can handle more complex data. However, because the cluster head node needs to process a large amount of network data, its energy consumption is also faster than that of other cluster nodes. Therefore, the network lifetime is shorter than that of the multi-frequency clustering structure. Moreover, the selection of the cluster head node in each layer of the clustering network is not fixed and any node can be called the cluster head. For a certain node, whether it can become a cluster head depends on the network structure and whether to activate the clustering mechanism. Therefore, the clustering algorithm of the network plays an important role in the clustering network.
0
▲Figure 10: Multi-frequency Clustering Structure
4、Application advantages
(1)Improve the scalability of multi-UAV systems
If all the unmanned aircraft systems can only communicate with the basic communication facilities, their operational range will be limited within the coverage area of those facilities. If a certain unmanned aircraft fails to establish a communication connection, it will result in the inability to operate. However, the unmanned aircraft ad hoc network can expand the operational range of the multi-unmanned aircraft system. Even if a certain node cannot connect to the basic communication facilities, it can still establish multi-hop communication links with other unmanned aircraft.
(2)Provide reliable and highly resilient multi-UAV communication
The terrain conditions will have certain impacts on the coverage range of facilities and the signal propagation. Obstacles such as mountains and buildings will hinder the signal transmission. The unmanned aerial vehicle (UAV) ad hoc network can help multiple UAV systems operate between obstacles. When communication at a certain node in the network is blocked, if an ad hoc network structure is adopted, the network's self-healing property can be utilized. By maintaining connectivity with other UAVs, the reliance on infrastructure can be reduced, thereby enhancing the reliability of the operation of the multi-UAV system.
(3)Support for the tactical coordination of unmanned aircraft formations
The task coordination of unmanned aerial vehicle (UAV) clusters mostly adopts distributed control. Members must be able to communicate with each other to achieve coordination. The self-organizing network structure can effectively prevent collisions among cluster members and effectively coordinate each member, thereby completing various tasks.
(4)Effectively assist other communication methods
The use of unmanned aerial vehicle (UAV) ad hoc networks can serve as an auxiliary means for other communication methods. It can be combined with ground control stations, infinite sensor networks, high-altitude satellites, and other aircraft to form an integrated space-ground-information network. Through the movement of multiple UAVs, different levels of information can be effectively relayed, playing the roles of regional communication nodes and effective blind spot supplementation.
(5)Reduce the payload capacity and expenses of the unmanned aircraft
The payload weight is of great significance for unmanned aerial vehicles. The lighter the weight, the higher the flight altitude and the longer the flight range. In unmanned aerial vehicle ad-hoc networks, only a small number of drones need to be equipped with heavier and more expensive basic communication equipment, while the other drones carrying lighter and cheaper ad-hoc network equipment can maintain the network operation, which has high flexibility and economy.
IV. Swarm Self-Organizing Network Products
0
▲Figure 3: Wireless Ad Hoc Network Equipment of the Unattended System
1. Product presentation
The unmanned system wireless ad hoc network radio system can form a vast information coverage network through the unmanned system cluster, maintaining interconnection among each other. It can collaboratively complete assigned tasks in a certain formation according to the on-site situation. At the same time, it is equipped with wireless ad hoc network collaborative communication, featuring no central control, high resilience and high self-repair capability. It can operate autonomously based on the on-site dynamics. In case of failure or malfunction, it can quickly adjust and supplement the interrupted network, ensuring that the entire network system remains efficient and orderly. It can provide wireless broadband communication for emergency response, crisis handling, anti-terrorism and riot control, rescue and disaster relief, and daily patrol, etc., at the first time.
2. Product feature
1
Decentralized networking: The positions of the nodes are equal, and they can act as terminal nodes, relay nodes or central nodes.
Any-structure networking: Nodes automatically identify and select the bandwidth data with the optimal route;
Security and confidentiality: Through multi-layer encryption such as working frequency point, carrier bandwidth, and scrambling code, it supports AES128/256.
Anti-interference and anti-destruction: Utilizing technologies such as COFDM, MIMO, and ARQ to enhance data bandwidth and anti-interference capabilities;
Multi-node flexible networking: Based on indicators such as channel quality, rate, and bit error rate, the link routes are automatically calculated and flexible networking is achieved.
Full IP networking interconnection: Supports data transmission, interconnection of various systems, and real-time interaction of multimedia services.
3. Product Parameter
Wireless characteristics | |
frequency domain | 1.4GHz |
r-f bandwidth | 5/10/20MHz,Flexible and customizable |
modulation system | COFDM |
Constellation modulation | BPSK/QPSK/16QAM/64QAM(self-adaption) |
transfer rate | peak 95Mbps@20MHz |
transmitted power | 2W |
transmission distance | >30km(range of visibility) |
WIFI | Support for Wi-Fi function |
receive sensitivity | -103dBm@5MHz |
video input | Supports IP network video input and Wi-Fi video access (HDMI/AV requires customization) |
Voice communication | Optional microphone or headphones |
Networking function | |
networking capabilities | ≥52 nodes |
Number of network hops | 10 jumps |
Registration time for network connection | The system will connect to the network 5 seconds after startup. |
topology of networks | Centralless networks, star networks, chain networks, mesh networks, etc. |
system parameter | |
way of encryption | AES128/AES256 |
power supply mode | DC 15-36V power supply |
Equipment power consumption | ≤30W |
Device interface | |
antenna interface | N型×2 |
GPS interface | SMA connector |
WIFI interface | J30J |
Ethernet interface | J30J |
Physical index | |
Equipment size | ≤156×150×75mm |
Equipment weight | 1.5kg |
level of protection | IP65 |
Work temperature | -30~+65℃ |
V. Research Team
Tongqian, as a professional manufacturer of wireless broadband private network communication equipment, focuses on the research and development of products in the field of wireless broadband communication. It has launched stable and reliable wireless communication products to the market, providing faster and more secure private network communication equipment and solutions. Currently, several of its developed products and application systems have been widely used in industries such as maritime, forestry, border and coastal defense, mines, and fire emergency, supporting the construction of a multi-standalone, three-dimensional broadband data link for interconnection among land, sea, and air.
2
VI. Application Cases
The structure of a bee colony is highly flexible and adaptable. The actual application scenarios are complex and there are numerous cases, covering multiple fields such as military and civilian.
In the military field, multi-agent and intelligent swarm technologies have the potential to significantly enhance combat effectiveness and reduce casualties. For instance, unmanned aerial vehicle (UAV) swarms can undertake diverse tasks such as aerial reconnaissance, target strikes, and electronic warfare. Through autonomous collaboration and intelligent decision-making, the UAV swarms can execute complex tasks with high efficiency and low cost, posing a significant threat to enemy targets.
In the civilian sector, the application of multi-agent and intelligent swarm technologies also holds great potential.
Traffic management: Multi-agent systems can be applied to intelligent traffic management, such as vehicle formation driving and intelligent traffic signal control, to enhance traffic efficiency and safety.
Logistics transportation: Drones in swarm form can be applied in logistics fields such as express delivery and goods transportation, enabling rapid and efficient delivery of goods.
Disaster relief: In disaster relief operations, drone swarms can be rapidly deployed to carry out tasks such as search and rescue and material delivery, thereby enhancing the efficiency of rescue efforts.
Environmental Monitoring: Multi-agent systems can be applied to environmental monitoring, such as air quality detection and forest fire risk warning, providing strong support for environmental protection.
Research Exploration: In the field of science, multi-agent and intelligent swarm technologies can be applied to exploration tasks in harsh environments such as the deep sea and space, contributing to the advancement of human scientific research.






